
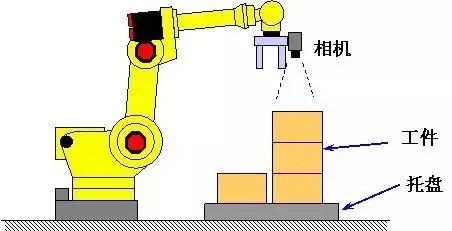
使用iRVision 2.5D允許機(jī)器人只借助一個(gè)普通2D相機(jī)來(lái)拾取碼放堆集的目標(biāo)。
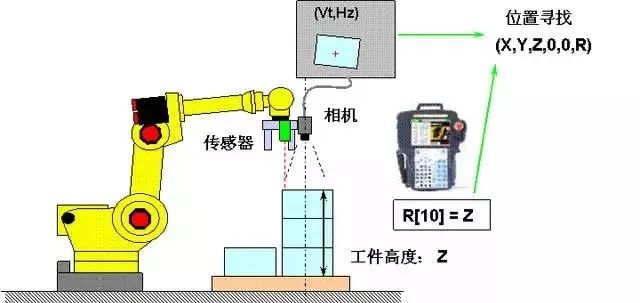
iRVision 視覺(jué)堆垛程序_1
(從寄存器R提取Z軸偏移)
此功能通過(guò)視覺(jué)計(jì)算尋找目標(biāo)的2D位置和指定的寄存器數(shù)值,并引導(dǎo)機(jī)器人的運(yùn)動(dòng)補(bǔ)償目標(biāo)的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時(shí)包括Z軸。
寄存器R被用作存儲(chǔ)已知的目標(biāo)Z軸高度,或者通過(guò)距離傳感器檢測(cè)出的Z軸高度信息。
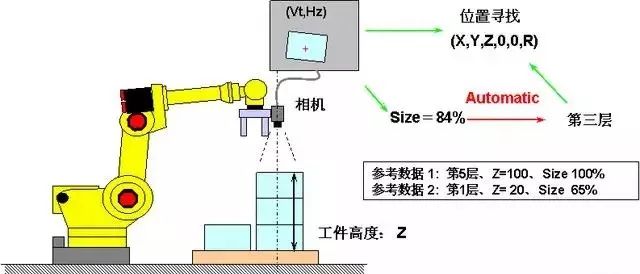
iRVision 視覺(jué)堆垛程序_2
(從堆垛層數(shù)提取Z軸偏移)
此功能通過(guò)視覺(jué)結(jié)合視覺(jué)檢測(cè)結(jié)果和根據(jù)目標(biāo)比例確定的目標(biāo)層數(shù)(目標(biāo)高度)計(jì)算目標(biāo)的位置。目標(biāo)層數(shù)依照參考比例和高度數(shù)據(jù)自動(dòng)確定,因而,即使在視覺(jué)檢測(cè)中存在細(xì)微的比例誤差,也可以通過(guò)一個(gè)離散的層數(shù)(目標(biāo)高度)來(lái)計(jì)算目標(biāo)的具體位置。
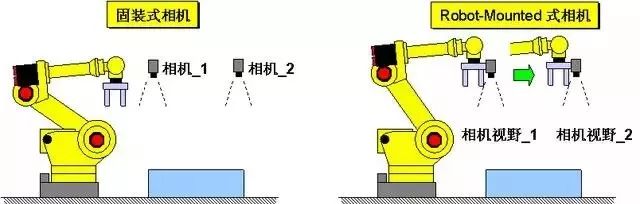
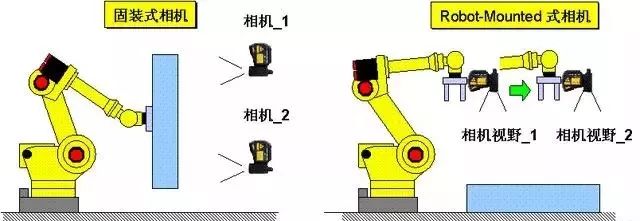
iRVision 2DV 復(fù)數(shù)視野功能
2D復(fù)數(shù)視野程序提供通過(guò)若干固裝式照相機(jī)定位大型目標(biāo)的能力,對(duì)通過(guò)Robot-Mounted式照相機(jī)進(jìn)行檢測(cè)同樣有效。
iRVision 3DL 復(fù)數(shù)視野功能
3D復(fù)數(shù)視野程序提供通過(guò)若干固裝式3D照相機(jī)定位大型目標(biāo)的能力,對(duì)通過(guò)Robot-Mounted式照相機(jī)進(jìn)行檢測(cè)同樣有效。
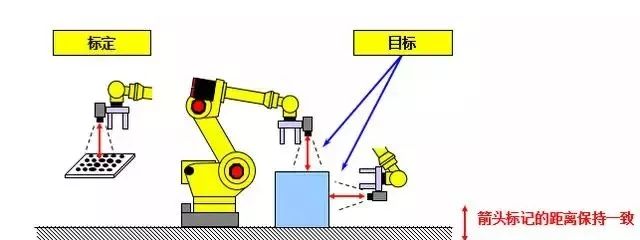
iRVision 浮動(dòng)坐標(biāo)系功能
(Floating Frame)
Robot-mounted 式照相機(jī)的標(biāo)定可以用于如下圖所示任意位置和方向下的iRVision程序。2D狀態(tài)下的移動(dòng)補(bǔ)償與照相機(jī)實(shí)際位置相關(guān)聯(lián)。照相機(jī)的標(biāo)定可以在任意位置下進(jìn)行。減少示教工作量。
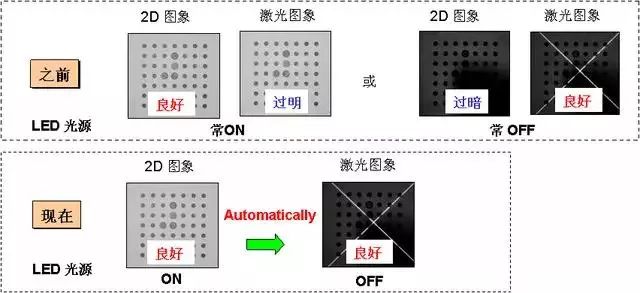
iRVision 3DL LED 光源控制
此功能支持在3DL視覺(jué)程序中,在捕獲2D圖象和激光照射圖象時(shí),同步控制LED光源的ON/OFF。通過(guò)此功能,可以獲得適當(dāng)?shù)耐獠抗饩€環(huán)境,提升整個(gè)視覺(jué)系統(tǒng)的能力。
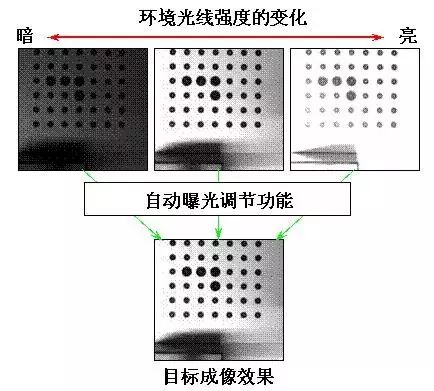
iRVision 自動(dòng)曝光功能
根據(jù)周圍環(huán)境光線強(qiáng)度的變化,iRVision將自動(dòng)調(diào)節(jié)曝光時(shí)間,以取得和示教良好圖象類似的成像效果,全天候運(yùn)行可能。
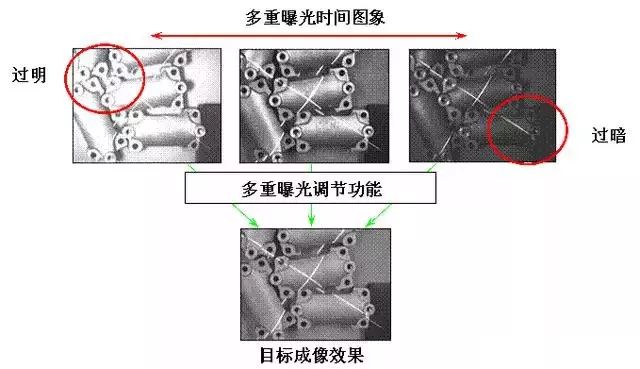
iRVision 多重曝光功能
通過(guò)多個(gè)不同曝光時(shí)間的成像,選擇一個(gè)接近示教效果的成像,以取得一個(gè)具有寬泛的、動(dòng)態(tài)的曝光范圍和成像效果。此功能在環(huán)境光線變化強(qiáng)烈時(shí)會(huì)有較好的效果。
iRVision 環(huán)形網(wǎng)絡(luò)功能
(Robot Ring)
通過(guò)此功能,未附有 iRVision 視覺(jué)系統(tǒng)的機(jī)器人可以通過(guò)網(wǎng)絡(luò)調(diào)用附有 iRVision 視覺(jué)系統(tǒng)的機(jī)器人的偏移檢測(cè)數(shù)據(jù)。
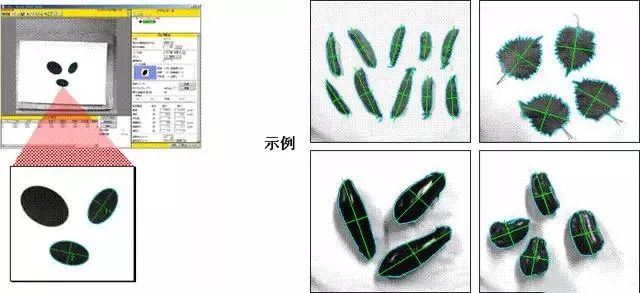
iRVision 斑點(diǎn)檢測(cè)功能
(Blob Locator Tool)
在成像范圍內(nèi)檢測(cè)與示教模型具有相似特性(如周長(zhǎng)、曲率等)的二元(黑白)目標(biāo)位置。與條件檢測(cè)(Conditional execution tool)同時(shí)使用,可以應(yīng)用于目標(biāo)排列和品質(zhì)檢測(cè)等多種場(chǎng)合。
iRVision 灰度檢測(cè)功能
(Histogram Tool)
在指定區(qū)域內(nèi)檢測(cè)光線強(qiáng)度(成像灰度),且計(jì)算多種特性例如平均數(shù)、*大值、*小值等。與條件檢測(cè)(Conditional execution tool)同時(shí)使用,可以對(duì)應(yīng)目標(biāo)排列和目標(biāo)在位檢測(cè)等多種場(chǎng)合。
此功能等同 V-500iA/2DV 中 Associate tool。
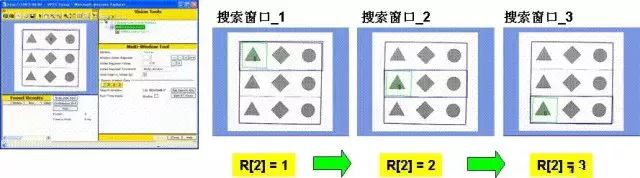
iRVision 多窗口檢測(cè)功能
(Multi-Window Tool
通過(guò)機(jī)器人控制器內(nèi)寄存器R的數(shù)值變化切換對(duì)應(yīng)的預(yù)設(shè)搜索窗口。
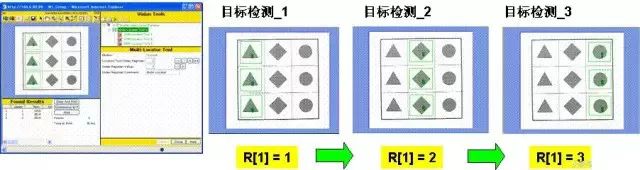
iRVision 多目標(biāo)檢測(cè)功能
(Multi-Locator Tool)
通過(guò)機(jī)器人控制器內(nèi)寄存器R的數(shù)值變化切換對(duì)應(yīng)的預(yù)設(shè)目標(biāo)視覺(jué)程序。
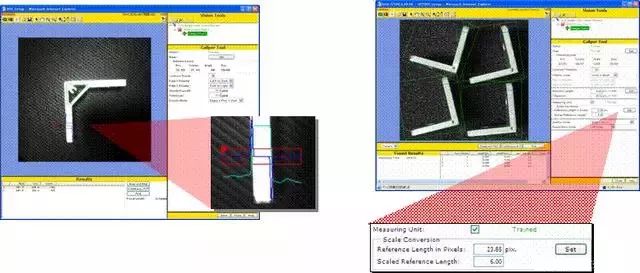
iRVision 長(zhǎng)度計(jì)測(cè)功能
(Caliper Tool)
對(duì)應(yīng)指定區(qū)域,偵測(cè)目標(biāo)邊緣并測(cè)量?jī)蓷l邊緣間長(zhǎng)度(單位:像素pixel),乘以轉(zhuǎn)換因子可以換算為mm。可以對(duì)應(yīng)目標(biāo)排列及品質(zhì)檢測(cè)等應(yīng)用場(chǎng)合。
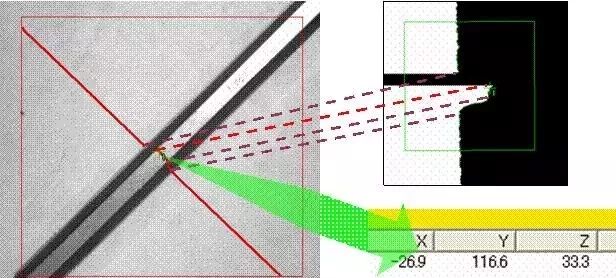
iRVision 截面檢測(cè)功能
(Cross Section)
偵測(cè)目標(biāo)的局部3D特性,顯示沿激光衍條照射路徑上的目標(biāo)截面形狀。對(duì)在3D視覺(jué)程序中因2D成像缺乏有效的特征量而無(wú)法進(jìn)行準(zhǔn)確定位時(shí)會(huì)比較有效。
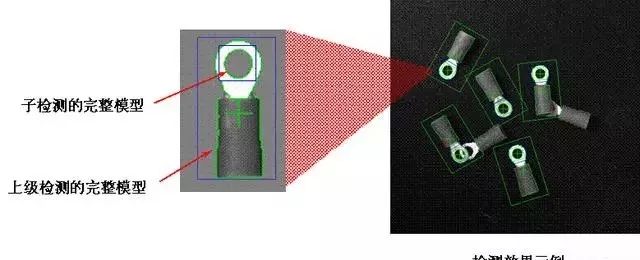
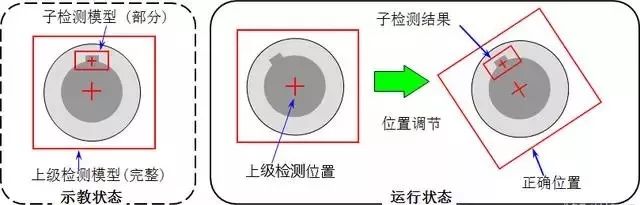
iRVision 子檢測(cè)功能
(Child Tool)
允許在一個(gè)父目標(biāo)檢測(cè)(GPM locator tool)下添加一個(gè)子目標(biāo)檢測(cè)(GPM locator tool)構(gòu)成二級(jí)檢測(cè)目錄。子檢測(cè)將根據(jù)父檢測(cè)的結(jié)果進(jìn)行動(dòng)態(tài)的判定。與條件檢測(cè)(Conditional execution tool)同時(shí)使用,可以對(duì)應(yīng)目標(biāo)排列和目標(biāo)在位檢測(cè)等多種場(chǎng)合。
iRVision 定位調(diào)整功能
(Position Adjust Tool)
依據(jù)子檢測(cè)的結(jié)果,對(duì)應(yīng)目標(biāo)表面明顯特征(如孔,鍵槽)調(diào)整父檢測(cè)的定位位置,獲得更精確的偏移和旋轉(zhuǎn)數(shù)據(jù)。對(duì)不能以整個(gè)示教模型進(jìn)行方向性定位的應(yīng)用較有效。對(duì)一個(gè)上級(jí)檢測(cè),可以使用多個(gè)下級(jí)子檢測(cè)來(lái)分析目標(biāo)的多種局部特性。
iRVision 曲面匹配功能
(Curved Surface Matching Tool)
通過(guò)目標(biāo)表面階梯狀的光線強(qiáng)度分布(亮或暗,模型內(nèi)顯示為不同顏色)來(lái)檢測(cè)曲面目標(biāo)的偏移與旋轉(zhuǎn)。識(shí)別全圓形物體可能。
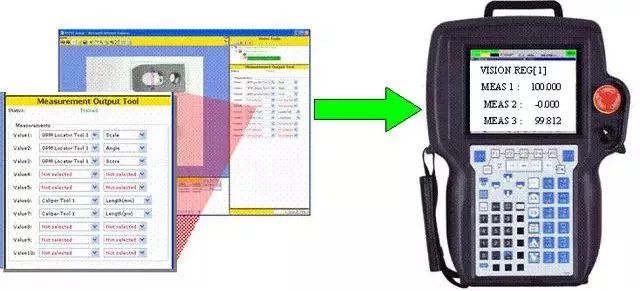
iRVision 計(jì)測(cè)輸出功能
(Measurement Output Tool)
輸出測(cè)量數(shù)值(Locator tool中的”Score/分值“、”Size/比例“,Caliper tool中的”Length/長(zhǎng)度“等)至視覺(jué)寄存器VR。這些數(shù)據(jù)可以復(fù)制至機(jī)器人數(shù)據(jù)寄存器R并在TP程序中自由調(diào)用。
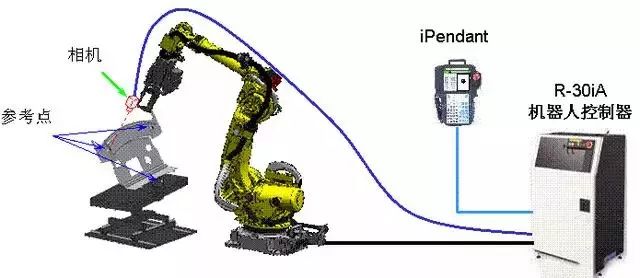
iRVision 視覺(jué)替換功能
( Vision Shift)
通過(guò)視覺(jué)程序調(diào)整機(jī)器人TP程序以對(duì)應(yīng)實(shí)際的工件位置,只需在機(jī)器人手爪端添加一臺(tái)相機(jī)即可執(zhí)行此功能。固定工件上的3處任意的參考點(diǎn)的位置數(shù)據(jù)將被自動(dòng)檢測(cè)并計(jì)算出補(bǔ)償數(shù)據(jù)。在離線編程或機(jī)器人系統(tǒng)搬遷后,使用此功能可極大減少機(jī)器人重新示教的時(shí)間。
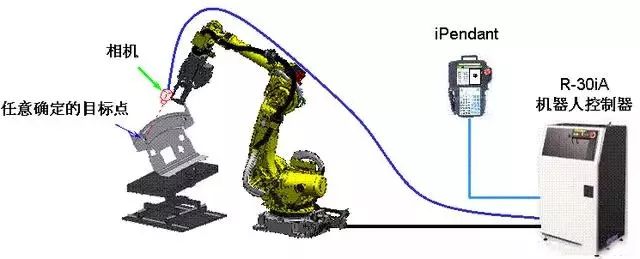
iRVision 視覺(jué)零位功能
( Vision Mastering)
通過(guò)視覺(jué)程序補(bǔ)償機(jī)器人J2~J5軸的零位數(shù)據(jù),只需在機(jī)器人手爪端添加一臺(tái)相機(jī)即可執(zhí)行此功能。機(jī)器人變換不同的姿態(tài),相機(jī)與確定目標(biāo)點(diǎn)間的相對(duì)位置數(shù)據(jù)將被自動(dòng)檢測(cè)并計(jì)算補(bǔ)償數(shù)據(jù)。此功能可應(yīng)用于提升機(jī)器人TCP示教準(zhǔn)確性,Vision shift 離線編程和其他視覺(jué)應(yīng)用。
iRVision 視覺(jué)坐標(biāo)系設(shè)置功能_1
( Vision Frame Set)
通過(guò)視覺(jué)程序設(shè)置機(jī)器人TCP,只需在機(jī)器人手爪端TCP對(duì)應(yīng)位置添加一臺(tái)相機(jī)即可執(zhí)行此功能。機(jī)器人變換不同的姿態(tài),基于對(duì)應(yīng)用戶坐標(biāo)系下相機(jī)與目標(biāo)點(diǎn)間的相對(duì)位置數(shù)據(jù)將被自動(dòng)檢測(cè)并計(jì)算機(jī)器人對(duì)應(yīng)TCP。此功能可提升TCP示教的速度和精確性。

iRVision 視覺(jué)坐標(biāo)系設(shè)置功能_2
( Vision Frame Set)
坐標(biāo)系設(shè)置的另一種功能:通過(guò)視覺(jué)設(shè)置一個(gè)與視覺(jué)標(biāo)定板對(duì)等的用戶坐標(biāo)系。通過(guò)裝置在機(jī)器人手爪末端的相機(jī),用戶坐標(biāo)系UF設(shè)置在視覺(jué)標(biāo)定板的原點(diǎn)位置(四點(diǎn)法),或當(dāng)視覺(jué)標(biāo)定板裝置在機(jī)器人手爪末端,則工具坐標(biāo)系UT設(shè)置在視覺(jué)標(biāo)定板的原點(diǎn)位置(六點(diǎn)法)。

服務(wù)熱線


